Robo-Bend: A Human-in-the-Loop Robotic Interface for Guitar String Bending
Harumoto Kaneko; Gou Koutaki; Shigeru Kai; Akira Maezawa
- poster
- Paper PDF link
- Presence: in person
- Type: short
- Session: Poster Session 3
Abstract:
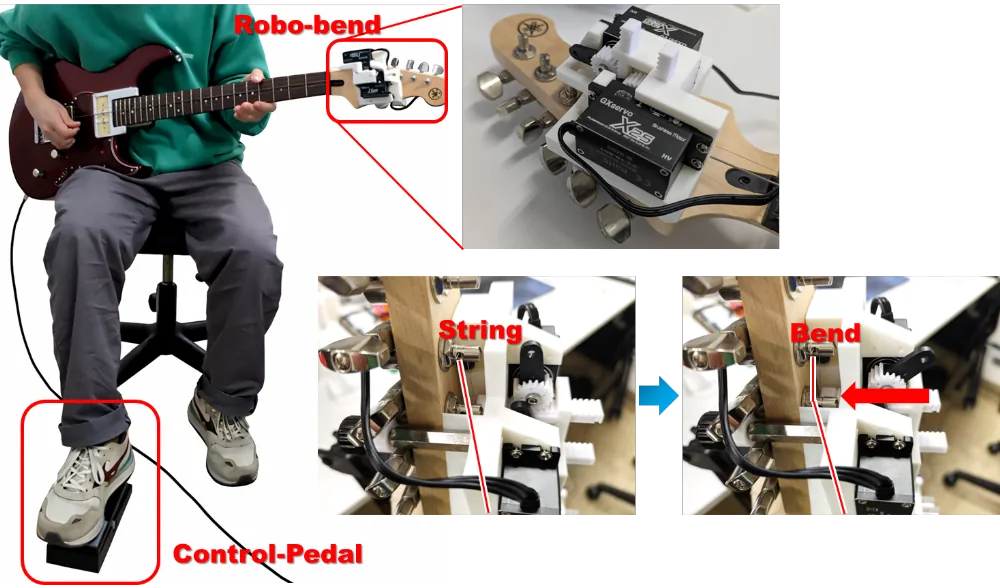
In this paper, we propose “Robo-Bend,” a non-destructive, retrofittable, and physically-driven system that augments the string bending expression of electric guitars. By directly manipulating the tension of specific strings using a drive mechanism mounted on the headstock, this system avoids the acoustic degradation associated with digital processing while decoupling the physical load of pitch modulation from the left hand to a foot pedal.
The results of evaluation experiments conducted with players of varying skill levels demonstrated that the system achieves a dynamic and stable pitch increase of approximately 280 cents, independent of physical constraints such as muscle strength or fret position, thereby significantly lowering the barrier to entry for playing. However, it was also confirmed that the non-linear mapping between the pedal manipulation and pitch changes requires new familiarization.
By redistributing the bending action between human and machine while preserving traditional acoustic characteristics, Robo-Bend serves as an augmented instrument that offers all players new possibilities for physical interaction and musical expression.